Control W5100S-EVB-Pico with Azure IoT Central Commands
지난 글에서, W5100S-EVB-Pico를 X.509 인증서를 사용해 Azure IoT Central에 인증 및 연결하는 방법을 정리했었다.
위 과정을 간략히 정리해본다면, 다음과 같이 나눌 수 있을 것 같다.
- W5100S-EVB-Pico 개발환경 설치
- IoT Central 어플리케이션 생성 및 설정
- X.509 인증서 생성 (Using OpenSSL)
- 프로젝트 다운로드 및 빌드
- 실행 및 모니터링
이번 글에서는 연결된 W5100-EVB-Pico에 C2D(Cloud to Device) 메시지를 전송하고, 이를 활용해 다른 장치를 제어하는 방법에 대해 정리해보고자 한다.
Azure IoT Central에서 C2D 메시지를 사용하는 방법은 몇 가지가 있는데 이 중 commands를 사용할 것이다.
Commands를 활용하면 원격지에서 장치를 제어하거나 설정을 변경하는 등 관리가 가능해진다. 또는, 장치로부터 상태 데이터를 수집할 수도 있다.
더 자세한 내용은 아래 가이드 문서에서 참조할 수 있다.
W5100S-EVB-Pico 디바이스를 기반으로, 관련 기능 사용을 위한 Azure IoT 함수를 추가하고 GPIO를 사용하여 외부 장치(Raspberry Pi 3)를 간단히 제어하는 내용을 정리해 본다.
이전 프로젝트를 기반으로 하는 것이기 때문에, 1~3 Step은 선행되었다는 가정 하에 진행한다.
장치 준비
이번 글에서 사용한 구성은 다음과 같다.
- W5100S-EVB-Pico
- Raspberry Pi 3 (제어 대상, 다른 디바이스도 가능)
- Jumper cable
- Ethernet cable
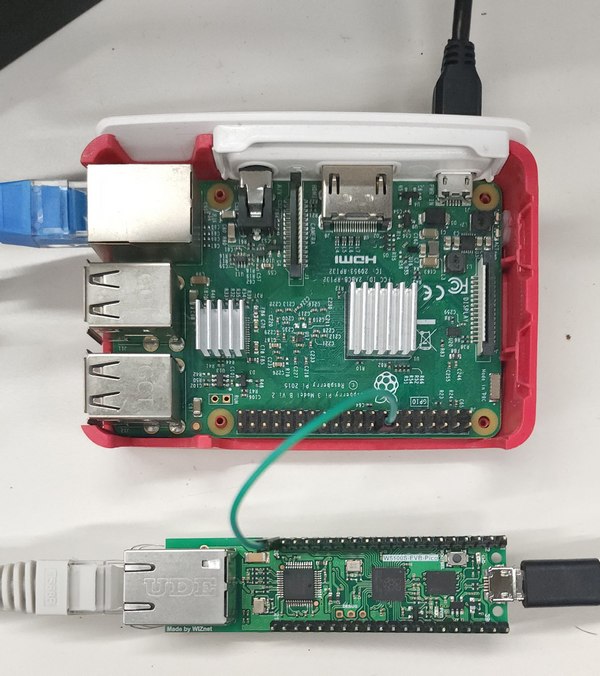
기존 하드웨어 구성에 더해 제어 대상이 필요했는데, 책상에 놀고있던 라즈베리 파이가 하나 있어서 이를 사용했다. GPIO를 제어할 수 있고 python을 실행할 수 있다면 어떤 Pi를 사용해도 될 것 같다.
GPIO pin을 하나 선택해서 W5100S-EVB-Pico와 점퍼 케이블을 사용해 연결해 주었다.
프로젝트 준비
지난번 글에서 Azure IoT Central에 연동하기 위한 예제로 프로비저닝 예제를 사용했었다.
다운받아둔 프로젝트가 있으면 그대로 사용하면 되고, 그렇지 않으면 git clone을 사용해 다운받는다.
git clone https://github.com/Wiznet/RP2040-HAT-AZURE-C
코드 수정 작성
main.c
사용할 예제를 설정한다. X.509 Provisioning 예제를 사용했다.
// The application you wish to use should be uncommented
//
//#define APP_TELEMETRY
//#define APP_C2D
//#define APP_CLI_X509
#define APP_PROV_X509
sample_certs.c
앞서 생성한 인증서를 변수의 값으로 추가한다.
| Variable | Certificates |
|---|---|
| pico_az_CERTIFICATE | device.crt certificate |
| pico_az_PRIVATE_KEY | device.key certificate |
| pico_az_id_scope | IoT Central ID scope |
| pico_az_COMMON_NAME | Device ID |
prov_dev_client_ll_sample.c
샘플 소스 코드에서 IoT Central Commands 호출에 대한 callback function을 추가하고 등록해준다.
관련 예제는 아래 링크에서 참조 가능하다.
아래 코드의 동작 내용은 다음과 같다.
- Commands 전송 시 Callback 함수 호출
- Method name 비교 (Name: powerReset 사용)
- 설정 동작 수행 및 응답 전송
W5100S-EVB-Pico에서는 GPIO15를 사용했다. (GP15)
Pinout은 다음 링크에서 참조 가능하다.
옵션으로, 함수 동작 여부를 확인하기 위해 User LED 제어 부분을 임시로 추가했다.
#define RESET_GPIO 15
#define LED_PIN 25
static int deviceMethodCallback(const char* method_name, const unsigned char* payload, size_t size, unsigned char** response, size_t* response_size, void* userContextCallback)
{
(void)userContextCallback;
(void)payload;
(void)size;
int result;
// User led on
gpio_put(LED_PIN, 1);
printf("Device method %s arrived...\n", method_name);
if (strcmp("powerReset", method_name) == 0) {
printf("\nReceived device powerReset request.\n");
const char deviceMethodResponse[] = "{ \"Response\": \"powerReset OK\" }";
*response_size = sizeof(deviceMethodResponse)-1;
*response = malloc(*response_size);
(void)memcpy(*response, deviceMethodResponse, *response_size);
sleep_ms(500);
gpio_put(RESET_GPIO, 1);
sleep_ms(100);
gpio_put(RESET_GPIO, 0);
result = 200;
} else {
// All other entries are ignored.
const char deviceMethodResponse[] = "{ }";
*response_size = sizeof(deviceMethodResponse)-1;
*response = malloc(*response_size);
(void)memcpy(*response, deviceMethodResponse, *response_size);
result = -1;
}
// User led off
gpio_put(LED_PIN, 0);
return result;
}
마지막으로 기존의 Device client handle에 device method callback을 등록한다.
(void)IoTHubDeviceClient_LL_SetMessageCallback(device_ll_handle, receive_msg_callback, &iothub_info);
// added line
(void)IoTHubDeviceClient_LL_SetDeviceMethodCallback(device_ll_handle, deviceMethodCallback, NULL);
라즈베리파이 3 Python 코드 작성
제어 대상이 될 라즈베리 파이 3에서, GPIO 상태를 모니터링하고 그에 따른 동작을 수행할 Python 코드를 작성했다.
코드 작성은 Raspberry Pi에 접속해서 Vim 등의 편집기로 작성해도 되고, Host PC에서 작성 후 Samba나 scp로 코드를 복사해줘도 된다.
여기에서는 Samba 설정 후 코드를 VS Code에서 불러와 편집 및 테스트하면서 진행했다.
내용은 다음과 같다.
- BCM 모드 사용
- Board 모드와 BCM 모드 중 선택 가능
- GPIO Pin 기준인 BCM 모드 사용
- Pinmap 참조: Raspberry Pi Pinmap
- GPIO Falling event 감지
- 이벤트 발생 시 설정한 동작 수행 (예: reboot)
gpio_test.py
import RPi.GPIO as gpio
import time
import os
channel = 23
# Set numbering system
gpio.setmode(gpio.BCM)
# gpio.setmode(gpio.BOARD)
# BCM23 (pin 16)
gpio.setup(channel, gpio.IN, pull_up_down=gpio.PUD_UP)
def restart():
print('System will be restart...')
time.sleep(2)
os.system("sudo reboot")
def on_falling(channel):
print(f'gpio falling event detected! {channel}')
restart()
try:
# Add event detect and callback function
gpio.add_event_detect(channel, gpio.FALLING, callback=on_falling, bouncetime=200)
# Wait for event
while True:
time.sleep(1)
except KeyboardInterrupt:
gpio.cleanup()
finally:
gpio.cleanup()
Azure IoT Central application 설정
Device Template 작성
Commands 항목 추가
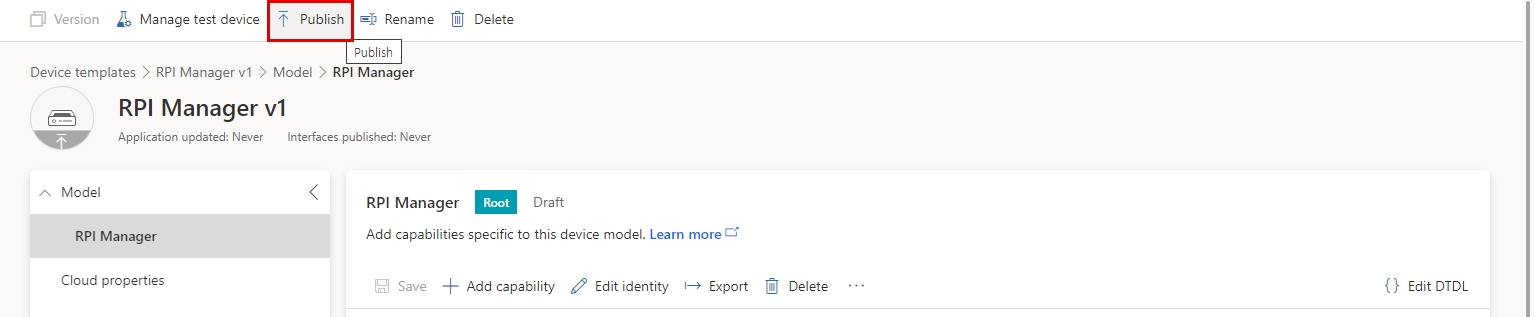
기존 템플릿 구성에서, powerReset 이라는 이름으로 Command type capability를 추가했다.
Name 값은 실제 호출되는 method 이름이며 대소문자를 구분하므로 주의한다.

저장 후, 배포까지 완료해야 변경사항이 적용된다.
배포가 완료된 상태에서는 Publish 버튼이 비활성화 된다.
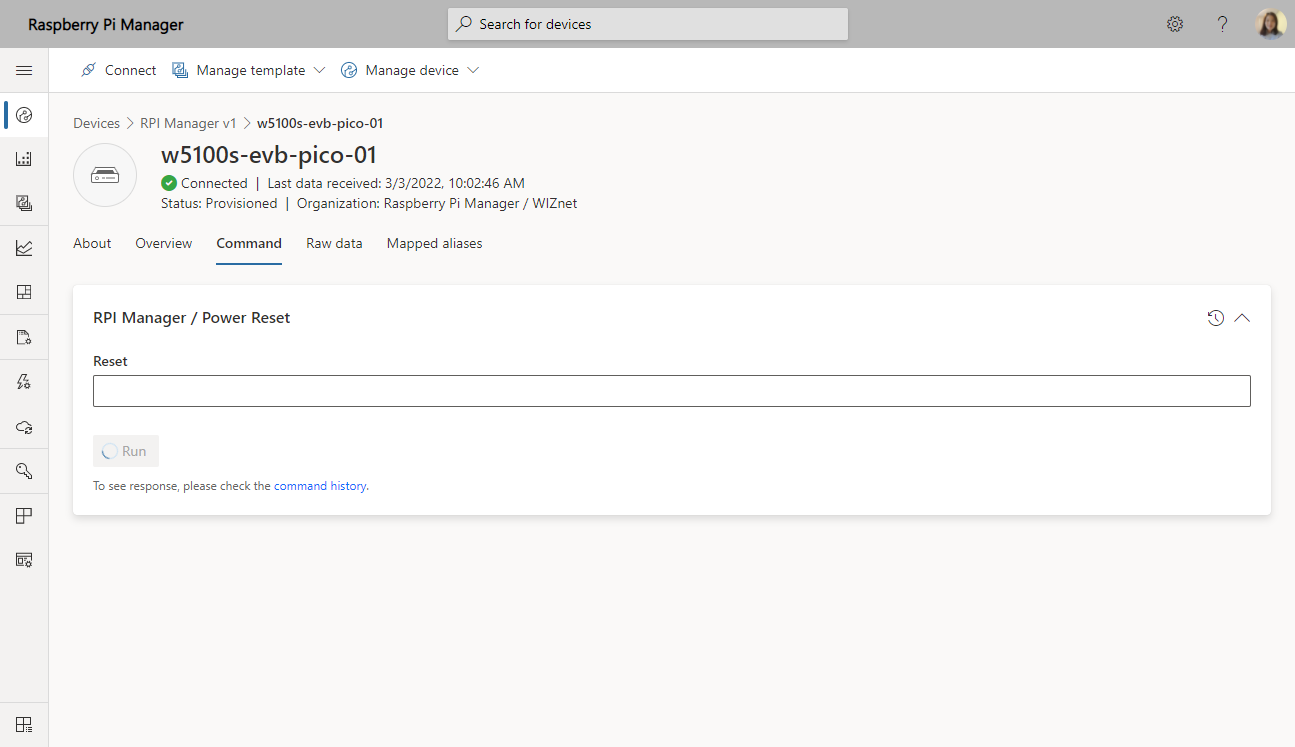
이제 디비이스 상세 페이지로 가면 Commands 탭이 생성되어 있고 템플릿에서 추가했던 Command 항목이 있는 것을 확인할 수 있다.

이 탭을 통해 디바이스로 Commands를 전송할 수 있다.
빌드, 실행 및 모니터링
W5100S-EVB-Pico app 빌드 및 업로드
수정한 코드를 빌드하고, 장치에 업로드한다.
빌드 및 업로드 방법은 이전 글에서 참조할 수 있다.
추가로, 실시간 동작을 모니터링 하기 위해 Tera Term을 사용했다.
라즈베리 파이 python 코드 실행
라즈베리 파이3 에 ssh로 접속 후 작성한 python 코드를 실행한다.
python gpio_test.py
Commands 전송 및 동작 모니터링
디바이스의 Commands 탭으로 이동 후, 명령을 전송하기 위해 Run 버튼을 클릭한다.
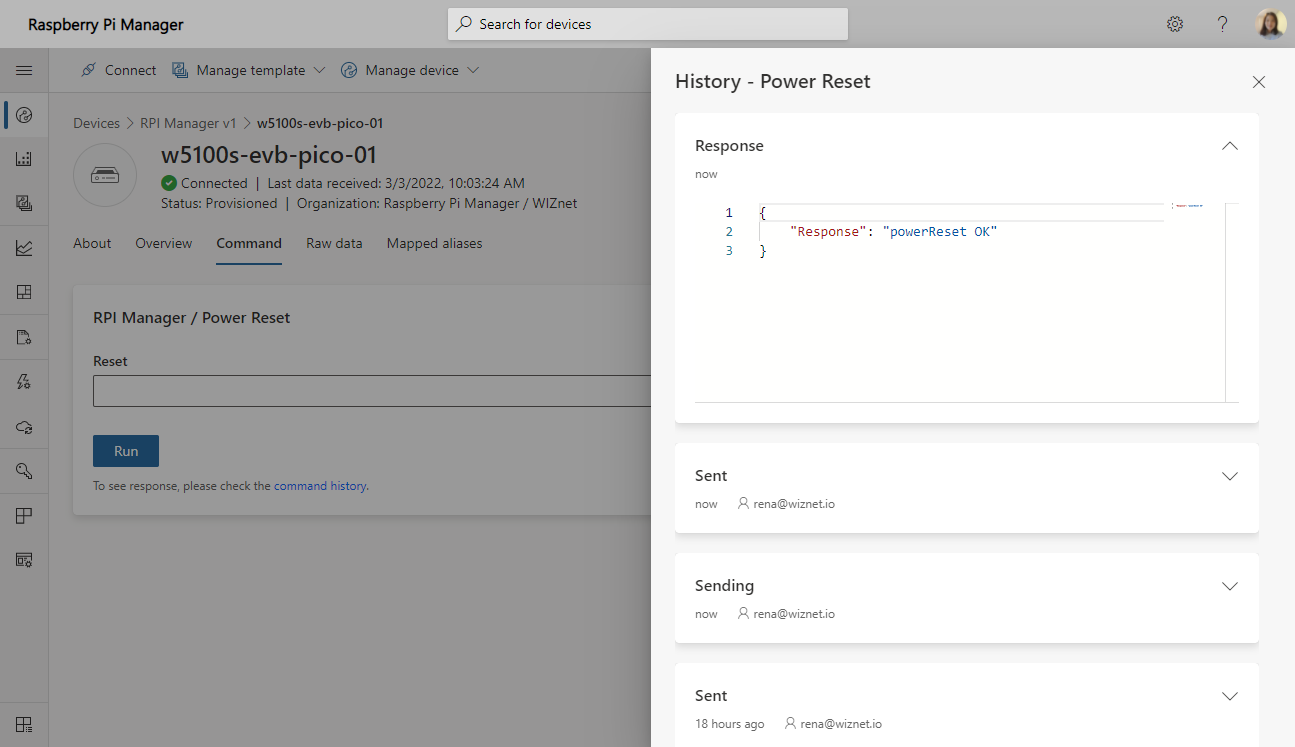
명령이 연결된 디바이스로 전송되고, 응답을 수신하면 성공 명령으로 처리된다.
Command History를 통해 수행 시간, 응답 등 명령 수행 로그를 확인할 수 있다.
디바이스 모니터링의 경우, 아래와 같이 구성하여 테스트하면서 진행했다.
좌측 터미널은 COM 포트를 통해 W5100S-EVB-Pico를 모니터링 하는 것이고 우측 터미널은 Raspberry Pi에 SSH로 접속한 화면이다.
- IoT Central에서 Command 전송
- W5100-EVB-Pico에서 powerReset 커맨드 수신
- GPIO를 통해 RPI3으로 신호 전송
- RPI3에서 신호 수신하여 Reboot 수행

커맨드가 정상적으로 수신되어 라즈베리 파이가 Reboot 되면서 SSH 연결이 끊긴 것을 확인할 수 있다.
이 글에서는 간단한 Reboot 동작만 적용했지만, 이를 응용하면 다양한 컴포넌트들을 제어하고 관리할 수 있을 것이다.
기회가 되면 그에 대한 내용들도 정리해 볼 예정이다.